

从动力学角度看优化算法:GAN的第三个阶段
作者丨苏剑林
研究方向丨NLP,神经网络
个人主页丨kexue.fm
在对 GAN 的学习和思考过程中,我发现我不仅学习到了一种有效的生成模型,而且它全面地促进了我对各种模型各方面的理解,比如模型的优化和理解视角、正则项的意义、损失函数与概率分布的联系、概率推断等等。GAN不单单是一个“造假的玩具”,而是具有深刻意义的概率模型和推断方法。
作为事后的总结,我觉得对 GAN 的理解可以粗糙地分为三个阶段:
1. 样本阶段:在这个阶段中,我们了解了 GAN 的“鉴别者-造假者”诠释,懂得从这个原理出发来写出基本的 GAN 公式(如原始 GAN、LSGAN),比如判别器和生成器的 loss,并且完成简单 GAN 的训练;同时,我们知道 GAN 有能力让图片更“真”,利用这个特性可以把 GAN 嵌入到一些综合模型中。
2. 分布阶段:在这个阶段中,我们会从概率分布及其散度的视角来分析 GAN,典型的例子是 WGAN 和 f-GAN,同时能基本理解 GAN 的训练困难问题,比如梯度消失和 mode collapse 等,甚至能基本地了解变分推断,懂得自己写出一些概率散度,继而构造一些新的 GAN 形式。
3. 动力学阶段:在这个阶段中,我们开始结合优化器来分析 GAN 的收敛过程,试图了解 GAN 是否能真的达到理论的均衡点,进而理解 GAN 的 loss 和正则项等因素如何影响的收敛过程,由此可以针对性地提出一些训练策略,引导 GAN 模型到达理论均衡点,从而提高 GAN 的效果。
事实上,不仅仅是 GAN,对于一般的模型理解,也可以大致上分为这三个阶段。当然也许有热衷于几何解释或其他诠释的读者会不同意第二点,觉得没必要非得概率分布的角度来理解。但事实上几何视角和概率视角都有一定的相通之处,而本文所写的三个阶段只是一个粗糙的总结,简单来说就是从局部到整体,然后再到优化器。
而本文主要聚焦于 GAN 的第三个阶段:GAN 的动力学。
一般情况下,GAN 可以表示为一个 min-max 过程,记作:

其中 maxDL(G,D) 这一步定义了一个概率散度而 maxG 这一步则在最小化散度,相关的讨论也可以参考文章《f-GAN简介:GAN模型的生产车间》和不用L约束又不会梯度消失的GAN,了解一下?。
注意,从理论上讲,这个 min-max 过程是有序的,即需要彻底地、精确地完成 maxD 这一步,然后才去 minG。但是很显然,实际训练 GAN 时我们做不到这一点,我们都是 D,G 交替训练的,理想情况下我们还希望 D,G 每次只各自训练一次,这样训练效率最高,而这样的训练方法对应于一个动力系统。
动力系统
在我们的“从动力学角度看优化算法”系列中,我们将梯度下降看成是在数学求解动力系统(也就是一个常微分方程组,简称 ODEs)。

其中 L(θ) 是模型的 loss,而 θ 是模型的参数。如果考虑随机性,那么则需要加上一个噪声项,变成一个随机微分方程,但本文我们不考虑随机性,这不影响我们对局部收敛性的分析。假定读者已经熟悉了这种转换,下面就来讨论 GAN 对应的过程。
GAN 是一个 min-max 的过程,换句话说,一边是梯度下降,另一边是梯度上升,假设 φ 是判别器的参数,θ 是判别器的参数,那么 GAN 对应的动力系统是:

当然,对于更一般的 GAN,有时候两个 L 会稍微不一样:

不管是哪一种,右端两项都是一正一负,而就是因为这一正一负的差异,导致了 GAN 训练上的困难。我们下面就逐步认识到这一点。
相关工作
将 GAN 的优化过程视为一个(随机)动力系统,基于这个观点进行研究分析的文献已有不少,我读到的包括 The Numerics of GANs[2]、GANs Trained by a Two Time-Scale Update Rule Converge to a Local Nash Equilibrium[3]、Gradient descent GAN optimization is locally stable[4]、Which Training Methods for GANs do actually Converge?[5],而本文只不过是前辈大牛们的工作的一个学习总结。
在这几篇文献中,大家可能比较熟悉的是第二篇,因为就是第二篇提出了 TTUR 的 GAN 训练策略以及提出了 FID 作为 GAN 的性能指标,而这篇论文的理论基础也是将 GAN 的优化看成前述的随机动力系统,然后引用了随机优化中的一个定理,得出可以给生成器和判别器分别使用不同的学习率(TTUR)。
而其余几篇,都是直接将 GAN 的优化看成确定性的动力系统(ODEs),然后用分析 ODEs 的方法来分析 GAN。由于 ODEs 的理论分析/数值求解都说得上相当成熟,因此可以直接将很多 ODEs 的结论用到 GAN 中。
Dirac GAN
本文的思路和结果主要参考 Which Training Methods for GANs do actually Converge?[5],这篇论文的主要贡献如下:
1. 提出了 Dirac GAN 的概念,借助它可以快速地对 GAN 的性态有个基本的认识;
2. 完整地分析了带零中心梯度惩罚的 WGAN(也是 WGAN-div)的局部收敛性;
3. 利用零中心梯度惩罚的 WGAN 训练了 1024 的人脸、256 的 LSUN 生成,并且不需要像 PGGAN 那样渐进式训练。
由于实验设备限制,第三点我们难以复现,而第二点涉及到比较复杂的理论分析,我们也不作过多讨论,有兴趣攻克的读者直接读原论文即可。本文主要关心第一点:Dirac GAN。
所谓 Dirac GAN,就是考虑真样本分布只有一个样本点的情况下,待研究的 GAN 模型的表现。假设真实样本点是零向量 0,而假样本为 θ,其实它也代表着生成器的参数;而判别器采用最简单的线性模型,即(加激活函数之前)为 D(x)=x?φ,其中 φ 代表着判别器的参数。Dirac GAN 就是考虑这样的一个极简模型下,假样本最终能否收敛到真样本,也就是说 θ 最终能否收敛到 0。
然而,原论文只考虑了样本点的维度是一维的情形,即 0,θ,φ 都是标量,但本文后面的案例表明,对于某些例子,一维 Dirac GAN 不足以揭示它的收敛性态,一般情况下至少需要 2 维 Dirac GAN 才能较好地分析一个 GAN 的渐近收敛性。
上一节我们给出了 Dirac GAN 的基本概念,指出它可以帮助我们对 GAN 的收敛性态有个快速的认识。在这部分内容中,我们通过分析若干常见 GAN,来更详细地表明 Dirac GAN 怎么做到这一点。
Vanilla GAN
Vanilla GAN,或者叫做原始 GAN、标准 GAN,它就是指 Goodfellow 最早提出来的 GAN,它有 saturating 和 non-saturating 两种形式。作为例子,我们来分析比较常用的 non-saturating 形式:

这里的 p(x),q(x) 分别是真假样本分布,而 q(z) 是噪声分布,D(x) 用 sigmoid 激活。对应到 Dirac GAN 下,那就简单得多,因为真样本只有一个点而且为 0,所以判别器的 loss 只有一项,而判别器可以完全写出为 θ?φ,其中 θ 也就是假样本,或者说生成器,最终结果是:

对应的动力系统是:

这个动力系统的均衡点(让右端直接等于 0)是 φ=θ=0,也就是假样本变成了真样本。但问题是从一个初始点出发,该初始点最终能否收敛到均衡点却是个未知数。
为了做出判断,我们假设系统已经跑到了均衡点附近,即 φ≈0,θ≈0,那么可以近似地线性展开:

最终近似地有:

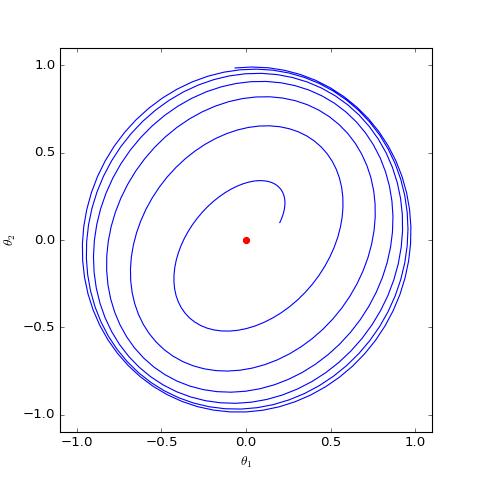
学过常微分方程的同学都知道,这是最简单的线性常微分方程之一,只要初始值不是 0,那么它的解是一个周期解,也就是说并不会出现 θ→0 的特性。换句话说,对于 non-saturating 的 Vanilla GAN,哪怕模型的初始化已经相当接近均衡点了,但是它始终不会收敛到均衡点,而是在均衡点附近振荡。数值模拟的结果则进一步证明了这一点。
事实上,类似的结果出现在任何形式的 f-GAN 中,即以 f 散度为基础的所有 GAN 都存在同样的问题(不计正则项),即它们会慢慢收敛到均衡点附近,最终都只是在均衡点附近振荡,无法完全收敛到均衡点。
这里再重复一下逻辑:我们知道系统的理论均衡点确实是我们想要的,但是从任意一个初值(相当于模型的初始化)出发,经过迭代后最终是否能跑到理论均衡点(相当于理想地完成 GAN 的训练),这无法很显然地得到结果,至少需要在均衡点附近做线性展开,分析它的收敛性,这就是说所谓的局部渐近收敛性态。
WGAN
f-GAN 败下阵来了,那 WGAN 又如何呢?它又能否收敛到理想的均衡点呢?
WGAN 的一般形式是:

对应到 Dirac GAN,D(x)=x?φ,而 ‖D‖L≤1 可以由 ‖φ‖=1 来保证(‖?‖ 是 l2 模长),换言之,D(x) 加上 L 约束后为 D(x)=x?φ/‖φ‖,那么 WGAN 对应的 Dirac GAN 为:

对应的动力系统是:

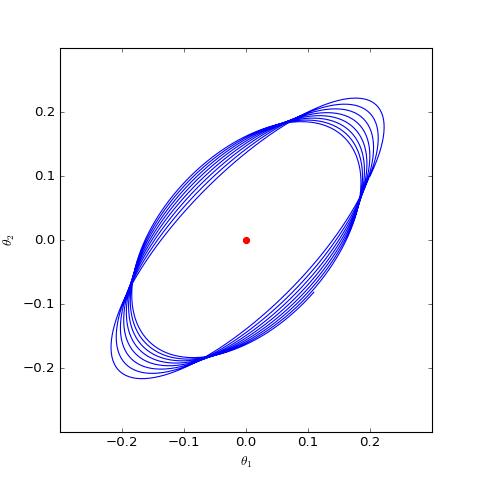
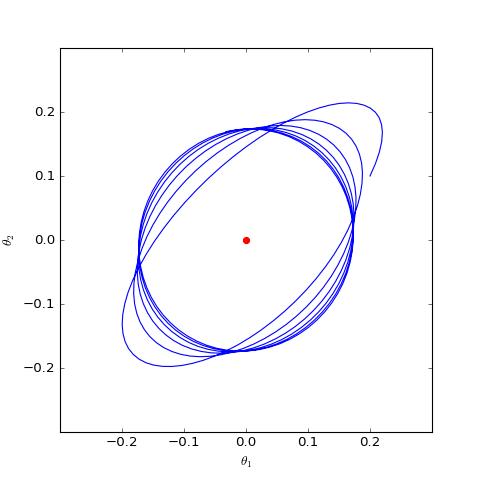
我们主要关心 θ 是否会趋于 0,可以引入类似前一节的线性展开,但是由于 ‖φ‖ 在分母,所以讨论起来会比较困难。最干脆的方法是直接数值求解这个方程组,结果如下图:
可以看到,结果依然是在均衡点附近振荡,并没能够达到均衡点。这个结果表明了,WGAN(同时自然也包括了谱归一化)都没有局部收敛性,哪怕已经跑到了均衡点附近,依然无法准确地落在均衡点上。
注:稍加分析就能得出,如果只考虑一维的 Dirac GAN,那么将无法分析本节的 WGAN 和后面的 GAN-QP,这就是只考虑一维情形的局限性。
WGAN-GP
大家可能会疑惑,前面不是讨论了WGAN了吗,怎么还要讨论WGAN-GP?
事实上,从优化角度看,前面所说的 WGAN 和 WGAN-GP 是两类不一样的模型。前面的 WGAN 是指事先在判别器上加上 L 约束(比如谱归一化),然后进行对抗学习;这里的 WGAN-GP 指的是判别器不加 L 约束,而是通过梯度惩罚项(Gradient Penalty)来迫使判别器具有 L 约束。
这里讨论的梯度惩罚有两种,第一种是 Improved Training of Wasserstein GANs[6]提出来的“以1为中心的梯度惩罚”,第二种是 Wasserstein Divergence for GANs[7]、Which Training Methods for GANs do actually Converge?[5]等文章提倡的“以 0 为中心的梯度惩罚”。下面我们会对比这两种梯度惩罚的不同表现。
梯度惩罚的一般形式是:

其中 c=0 或 c=1,而 r(x) 是 p(x) 和 q(x) 的某个衍生分布,一般直接取真样本分布、假样本分布或者真假样本插值。
对于 Dirac GAN 来说:

也就是说它跟 x 没关系,所以 r(x) 怎么取都不影响结果了。因此,WGAN-GP 版本的 Dirac GAN 形式为:

对应的动力系统是:

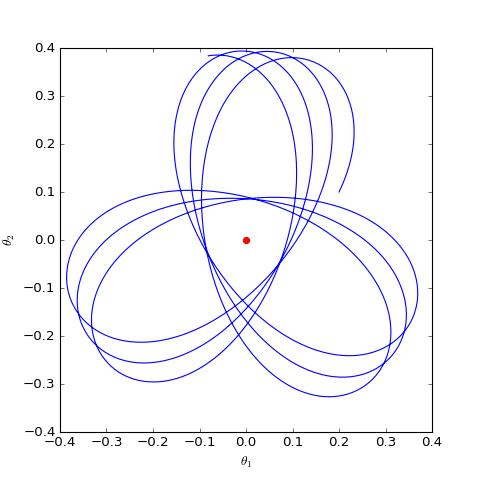
下面我们分别观察 c=0,c=1 时 θ 是否会趋于 0,当 c=0 时其实只是一个线性常微分方程组,可以解析求解,但 c=1 时比较复杂,因此简单起见,我们还是直接用数值求解的方式:
上图是在同样的初始条件(初始化)下,c=0,c=1 的梯度惩罚的不同表现,两图的其他参数都一样。可以看到,加入“以1为中心的梯度惩罚”后,Dirac GAN 并没有渐近收敛到原点,反而只是收敛到一个圆上;而加入“以 0 为中心的梯度惩罚”则可以达到这个目的。这说明早期提出的梯度惩罚项确实是存在一些缺陷的,而“以 0 为中心的梯度惩罚”在收敛性态上更好。
尽管上述仅仅对Dirac GAN做了分析,但结论具有代表性,因为关于0中心的梯度惩罚的优越性的一般证明在 Which Training Methods for GANs do actually Converge?[5]中已经给出,并得到实验验证。
GAN-QP
最后来分析一下自己提出的 GAN-QP 表现如何。相比 WGAN-GP,GAN-QP 用二次型的差分惩罚项替换了梯度惩罚,并补充了一些证明。相比梯度惩罚,差分惩罚的最主要优势是计算速度更快。
GAN-QP 可以有多种形式,一种基本形式是:

对应的 Dirac GAN 为:

对应的动力系统是:
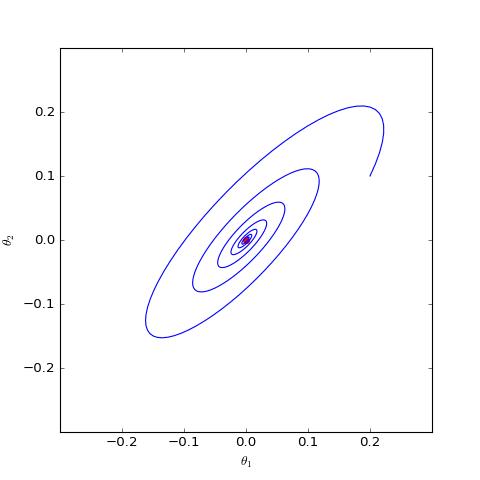
数值结果如下图(第一个图像):
很遗憾,同大多数 GAN 一样,GAN-QP 也是振荡的。
通过上面的分析,我们得到的结论是:目前零中心的 WGAN-GP(或者称为 WGAN-div)的理论性质最好,只有它是局部收敛的,其余的 GAN 变体都一定的振荡性,无法真正做到渐近收敛。当然,实际情况可能复杂得多,Dirac GAN 的结论只能一定程度上说明问题,带来一个直观感知。
那么,如果 Dirac GAN 的结论具有代表性的话(即多数 GAN 实际情况下都难以真正收敛,而是在均衡点附近振荡),我们应该如何缓解这个问题呢?
L2正则项
第一个方案是考虑往(任意 GAN 的)判别器的权重加入 L2 正则项。综上所述,零中心的梯度惩罚确实很好,但无奈梯度惩罚太慢,如果不愿意加梯度惩罚,那么可以考虑加入 L2 正则项。
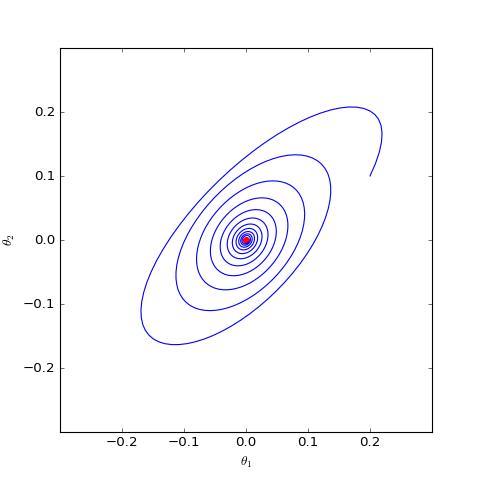
直观上看,GAN 在均衡点附近陷入振荡,达到一种动态平衡(周期解,而不是静态解),而 L2 正则项会迫使判别器的权重向零移动,从而有可能打破这种平衡,如上图中的第二个图像。在我自己的 GAN 实验中,往判别器加入一个轻微的 L2 正则项,能使得模型收敛更稳定,效果也有轻微提升。(当然,正则项的权重需要根据模型来调整好。)
权重滑动平均
事实上,缓解这个问题最有力的技巧,当属权重滑动平均(EMA)。
权重滑动平均的基本概念,我们在“让Keras更酷一些!”:中间变量、权重滑动和安全生成器已经介绍过。对于 GAN 上的应用,其实不难理解,因为可以观察到,尽管多数 GAN 最终都是在振荡,但它们振荡中心就是均衡点!所以解决方法很简单,直接将振荡的轨迹上的点平均一下,得到近似的振荡中心,然后就得到了一个更接近均衡点(也就是更高质量)的解!
权重滑动平均带来的提升是非常可观的,如下图比较了有无权重滑动平均时,O-GAN 的生成效果图:



可以看到,权重滑动平均几乎给生成效果带来了质的提升。衰减率越大,所得到的生成结果越平滑,但同时会丧失一些细节;衰减率越小,保留的细节越多,但自然也可能保留了额外的噪声。现在主流的 GAN 都使用了权重滑动平均,衰减率一般为 0.999。
顺便说一下,在普通的监督训练模型中,权重滑动平均一般也能带来收敛速度的提升,比如下图是有/无权重滑动平均时,ResNet20 模型在 cifar10 上的训练曲线,全程采用 Adam 优化器训练,学习率恒为 0.001,权重滑动平均的衰减率为 0.9999:
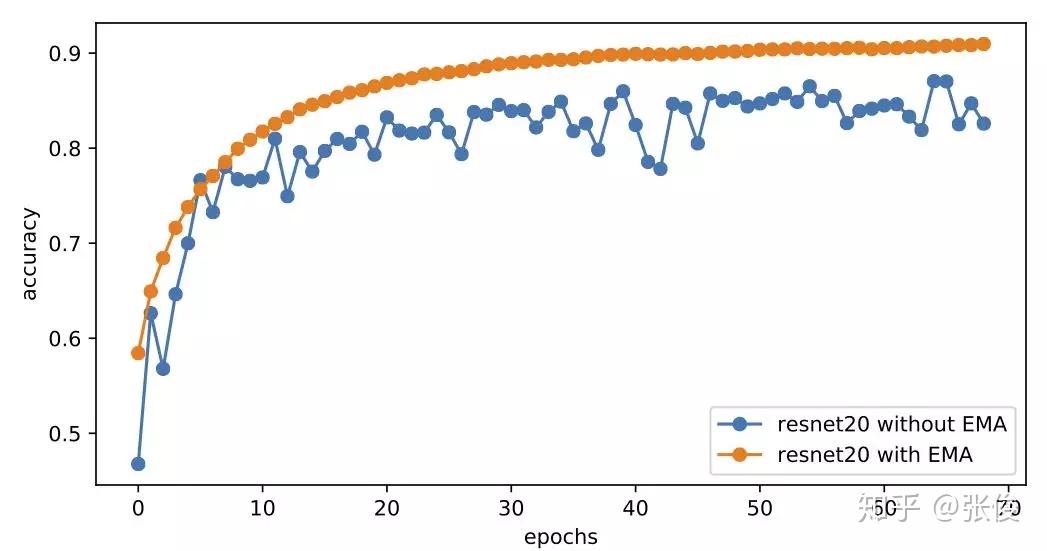
可以看到,加上权重滑动平均之后,模型以一种非常平稳、快速的姿态收敛到 90%+ 的准确率,而不加的话模型准确率一直在 86% 左右振荡。这说明类似 GAN 的振荡现象在深度学习训练时是普遍存在的,通过权重平均可以得到质量更好的模型。
本文主要从动力学角度探讨了 GAN 的优化问题。跟本系列的其他文章一样,将优化过程视为常微分方程组的求解,对于 GAN 的优化,这个常微分方程组稍微复杂一些。
分析的过程采用了 Dirac GAN 的思路,利用单点分布的极简情形对 GAN 的收敛过程形成快速认识,得到的结论是大多数 GAN 都无法真正收敛到均衡点,而只是在均衡点附近振荡。而为了缓解这个问题,最有力的方法是权重滑动平均,它对 GAN 和普通模型训练都有一定帮助。
本文作图代码参考:
https://github.com/bojone/gan/blob/master/gan_numeric.py
[2]Lars Mescheder and Sebastian Nowozin and Andreas Geiger. "The Numerics of GANs". Advances in Neural Information Processing Systems. 2017.
[3]Martin Heusel, Hubert Ramsauer, Thomas Unterthiner, Bernhard Nessler and Sepp Hochreiter. "GANs Trained by a Two Time-Scale Update Rule Converge to a Local Nash Equilibrium". Advances in Neural Information Processing Systems. 2017.
[4]Vaishnavh Nagarajan, J. Zico Kolter. "Gradient descent GAN optimization is locally stable". Advances in Neural Information Processing Systems. 2017.
[5]Lars Mescheder, Andreas Geiger and Sebastian Nowozin. "Which Training Methods for GANs do actually Converge?". International Conference on Machine Learning 2018.
[6]Ishaan Gulrajani, Faruk Ahmed, Martin Arjovsky, Vincent Dumoulin and Aaron Courville. "Improved Training of Wasserstein GANs". Advances in Neural Information Processing Systems. 2017.
[7]Jiqing Wu, Zhiwu Huang, Janine Thoma, Dinesh Acharya and Luc Van Gool. "Wasserstein Divergence for GANs". The European Conference on Computer Vision (ECCV). 2018.
如何才能让更多的优质内容以更短路径到达读者群体,缩短读者寻找优质内容的成本呢? 答案就是:你不认识的人。
总有一些你不认识的人,知道你想知道的东西。PaperWeekly 或许可以成为一座桥梁,促使不同背景、不同方向的学者和学术灵感相互碰撞,迸发出更多的可能性。
PaperWeekly 鼓励高校实验室或个人,在我们的平台上分享各类优质内容,可以是最新论文解读,也可以是学习心得或技术干货。我们的目的只有一个,让知识真正流动起来。
来稿标准:
? 稿件确系个人原创作品,来稿需注明作者个人信息(姓名+学校/工作单位+学历/职位+研究方向)
? 如果文章并非首发,请在投稿时提醒并附上所有已发布链接
? PaperWeekly 默认每篇文章都是首发,均会添加“原创”标志
投稿方式:
? 方法一:在PaperWeekly知乎专栏页面点击“投稿”,即可递交文章
? 方法二:发送邮件至:hr@paperweekly.site ,所有文章配图,请单独在附件中发送
? 请留下即时联系方式(微信或手机),以便我们在编辑发布时和作者沟通
PaperWeekly 是一个推荐、解读、讨论、报道人工智能前沿论文成果的学术平台。如果你研究或从事 AI 领域,欢迎在公众号后台点击「交流群」,小助手将把你带入 PaperWeekly 的交流群里。
加入社区:http://paperweek.ly
微信公众号:PaperWeekly
新浪微博:@PaperWeekly


